
This work introduces an integrated fabrication, design, and actuation method for creating functional micro-scale origami. The method enables these active origami to achieve rapid and multi-degrees-of-freedom motions such that they can achieve complex functions. Yi Zhu (Phd Candidate from DRSL), Mayur Birla (PhD Candidate advised by Prof. KR Oldham), Prof. KR Oldham, and Prof. ET Filipov developed this novel fabrication method and conducted experiments to demonstrate the superior capabilities of the system. This work was published on Adv. Funct. Mater.

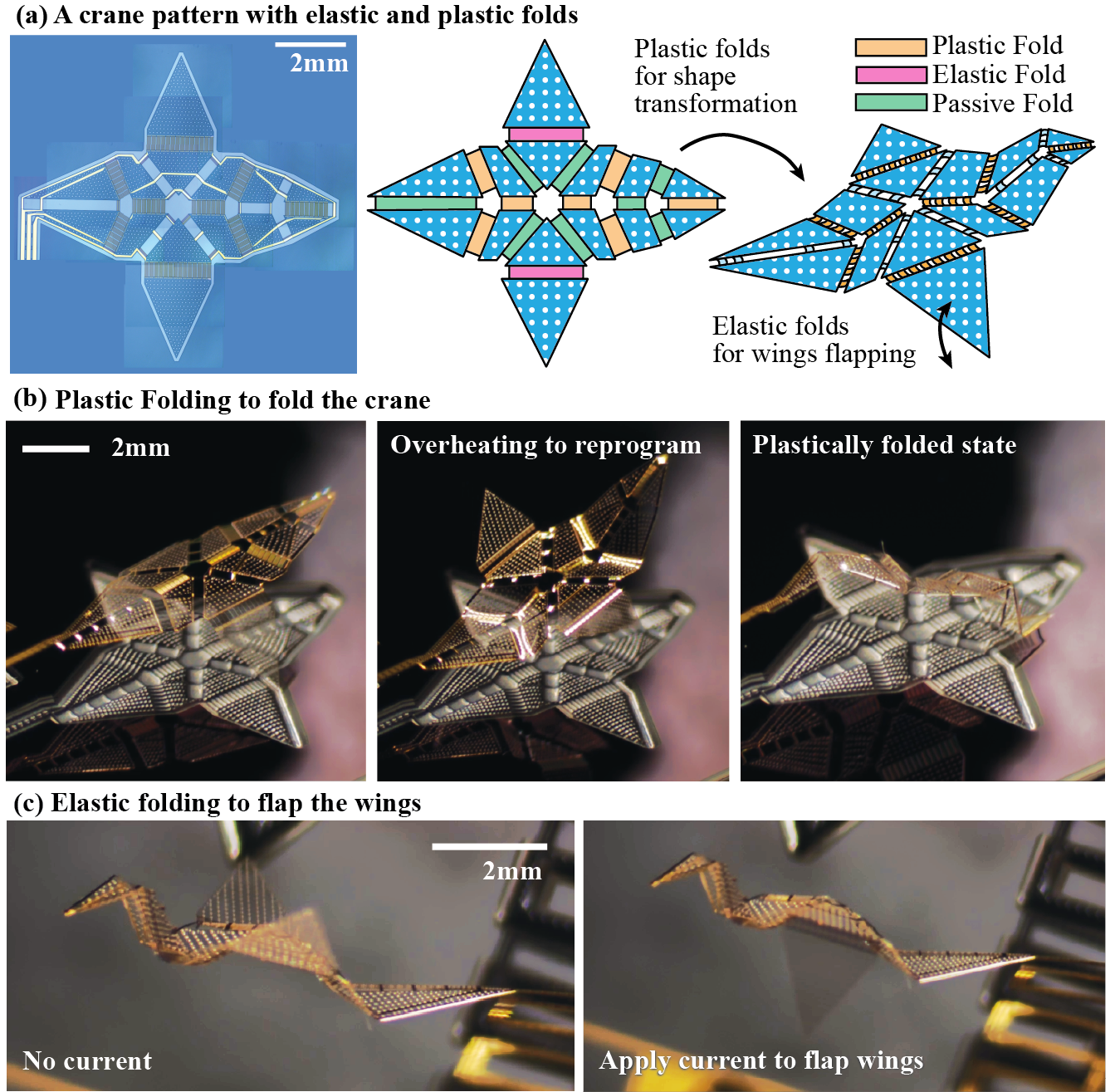
An elastically and plastically foldable micro-origami is developed and tested to create controllable and functional 3D shape morphing systems with multiple active degrees-of-freedom. The work demonstrates a versatile design-fabrication-actuation to achieve rapid folding, enhanced control, and function in different atmospheric environments, enabling applications in micro-robots, medical devices, and metamaterials.
See the original paper on Adv. Funct. Mater.
Media Coverage:
- Origami microbots: Centuries-old artfrom guides cutting-edge advances in tiny machines.
- Engineers Develop a New Way to Design, Fabricate, and Actuate Micro-robots.
- U-M Researchers Create Shape-shifting Micro-Robots Using Origami Principles
- These Origami-Inspired Micro-robots can Execute Complicated Tasks.
- Origami Principles can Unlock the Potential of Tiny Robots.
- Teeny robots get a speed boost from origami.
- Origami Microbots: Centuries-old guides cutting-edge advances in tiny machines