
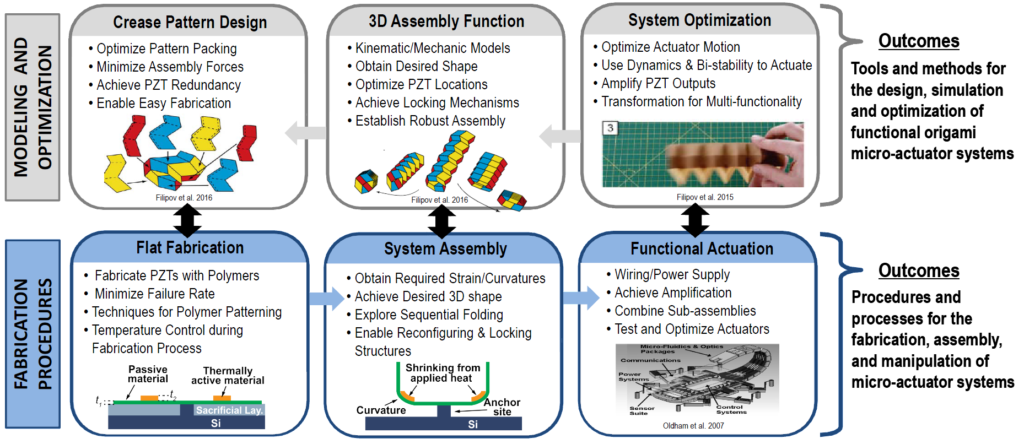
The small scale actuator project is funded by DARPA. In this project, our group is studying the potential of including origami inspired assemblages in the design of various MEMS (micro-electro-mechanical system) devices. The initial goal is to fabricate the folding device using combined PZT / Active Polymer system to enable assembly of intricate and functional 3D structures. In this project, we have worked on developing simulation platforms for origami inspired micro-robots and fabrication techniques to bring these robots into reality.
Project Organization:
Principal Investigator: Prof. Evgueni T. Filipov,
Subcontracted Investigator: Prof. Kenn Oldham,
Graduate Student: Maria Redoutey, Yi ZHU, Mira Diab El Harakeh.
Undergraduate Student: Kevin Turaczy, Biniyam Chamiso.
Publications Related to this Research:
- Zhu, Y., Birla, M., Oldham, K., Filipov, E.T., (2020) “Elastically and Plastically Foldable Electro-Thermal Micro-Origami for Controllable and Rapid Shape Morphing”. Adv. Funct. Mater. 2003741. Link & See papers, details, and media coverage.
- Zhu, Y., and Filipov, E.T., (2020) “A Bar and Hinge Model for Simulating Bistability in Origami Structures with Compliant Creases” Journal of Mechanisms and Robotics, Vol. 12,No. 2, 021110. Link
- Zhu, Y., and Filipov, E.T., (2019) “An Efficient Numerical Approach for Simulating Contact in Origami Assemblages” Proceedings of the Royal Society – A, Vol. 475. 20190366. Link
- Zhu, Y., and Filipov, E.T., (2019) “Simulating Compliant Crease Origami with a Bar and Hinge Model,” ASME IDET Conference, Anaheim CA, Vol. 5B, 97119. Link
Micro-Fabrication of Electro-Thermal Active Origami
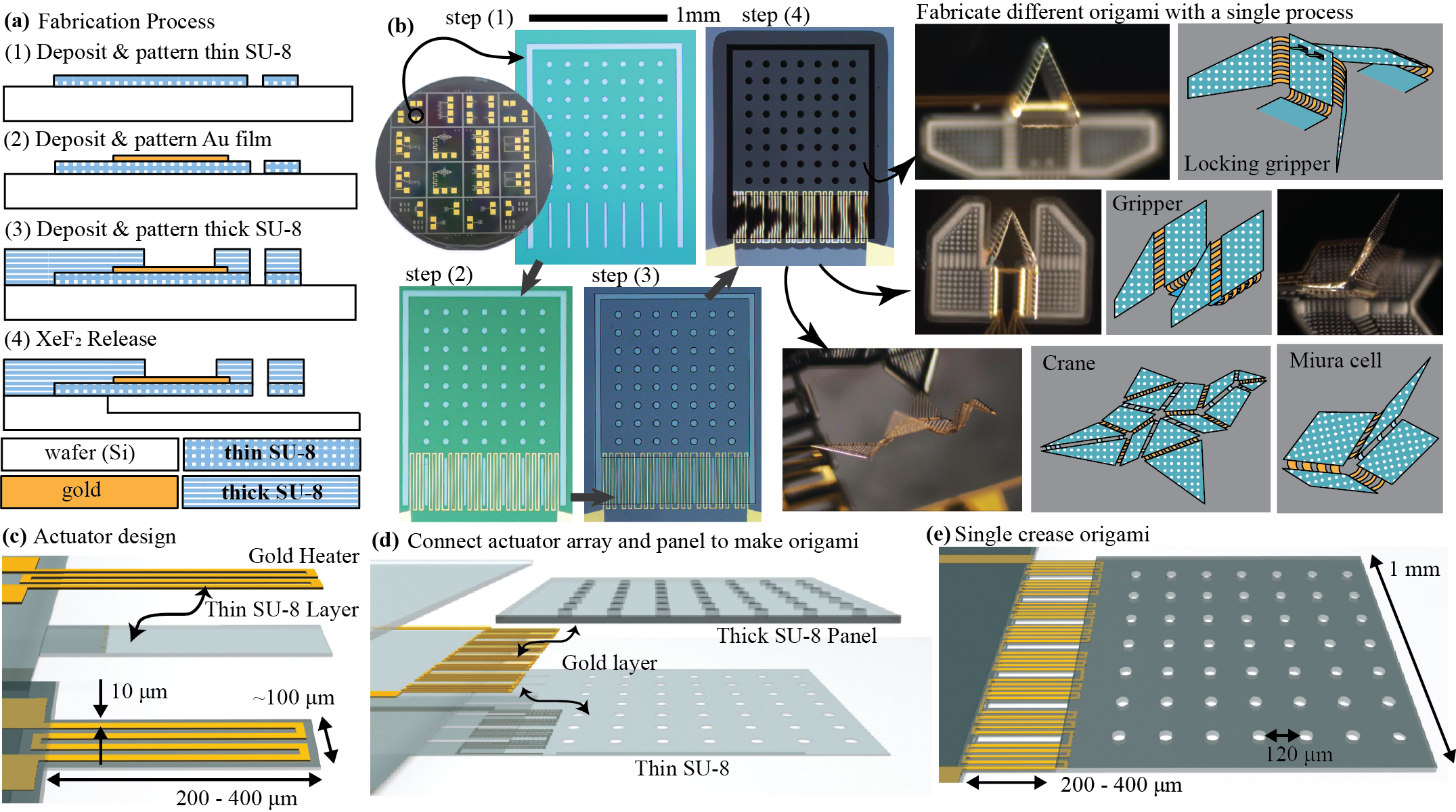
We designed and fabricated a novel electro-thermal micro-origami system in this work. This micro-origami system can achieve rapid and large elastic folding in normal atmospheric environments and can permanently reprogram its rest angle when no current applied by overheating the creases. This method allows us to locally control the folding of creases without relying on environmental stimuli so that we can create active origami with multiple controllable degree-of-freedom to achieve complex motion and functions. The fabrication method of this micro-origami system is published on Adv. Funct. Mater. Link & See papers, details, and media coverage.
Simulation of Global Contact and Compliant Creases Within Origami
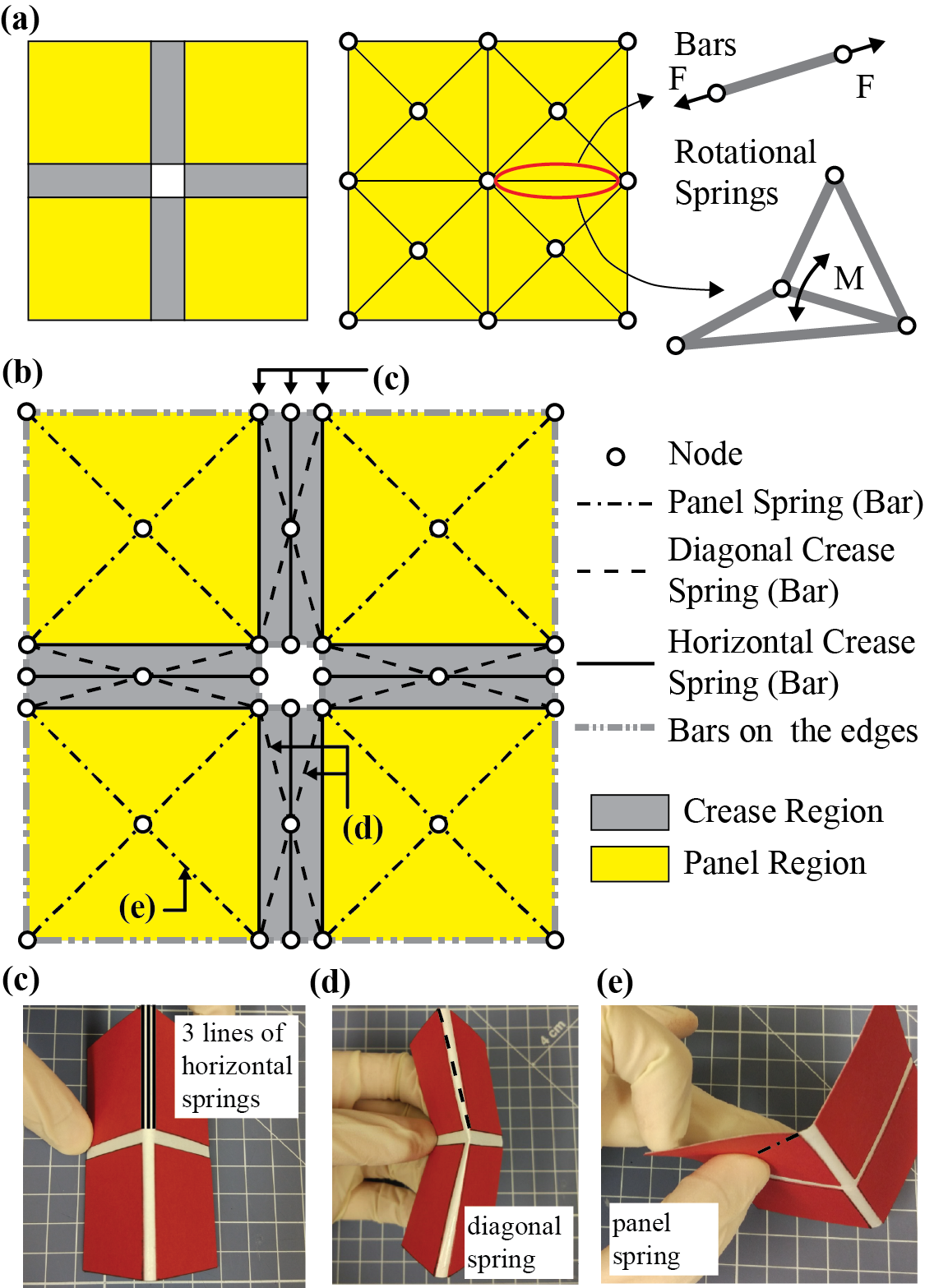
An improved bar and hinge model is developed to capture the global panel contact between panels and presence of compliant creases within origami structures. We introduced additional bar elements and rotational hinge elements to represent the compliant crease structures within an origami. The bar areas and by matching the stiffness of bar and hinge model to the theoretical plate model and the rotational spring stiffness is derived by matching the out-of-plane stiffness of the bar and hinge model to the pseudo-rigid-body model proposed by Howell. We verify the model performance by comparing the bar and hinge model with the FE simulation and good agreement is obtained. We also show that capturing the existence of compliant crease is significant for modeling bistable and multistable behaviors of these origami structures.
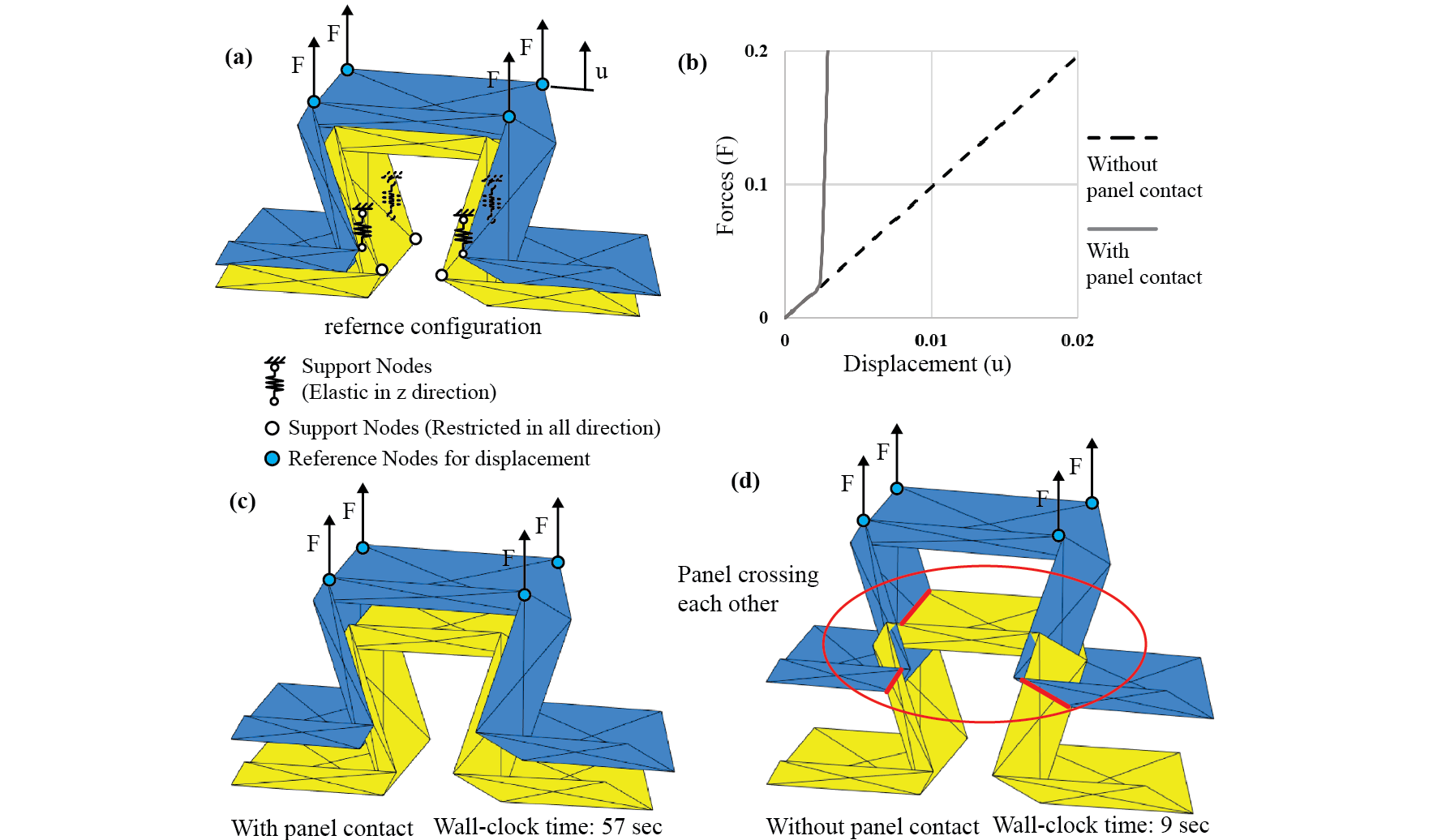
Our model can also simulate the global panel contact within the origami structures. This is achieved by introducing a barrier function into the principle of stationary potential energy framework to represents the panel contact. We formulate the contact with a triangulated panel and another node from the other contacting panel. The additional contact potential is defined such that an infinite potential is generated when the distance between the contacting panel and the contacting node approaches zero. A simulation package of this model is coded and published on GitHub. A detail introduction of the simulation code and related publication can be found here.
Acknowledgement:
The researchers of the project acknowledge support from DARPA Grant D18AP00071. The summary and published papers reflect the views and position of the authors, and not necessarily those of the funding entities.